美宇航局设计球形机器人:吸收着陆冲击力
美国宇航局正在设计一个柔软、可变形的遥控外骨骼,用于登陆地外行星。这种球形结构或许可以在没有任何帮助的情况下安全着陆,吸收撞击产生的大部分冲击力。
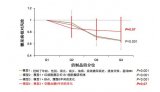
该任务的概念图,可能会有很多超级球形机器人展开,并降落在这里,然后在地表移动,进行科研探险。

由几十,甚至是数百个可折叠的微小遥控设备(每个的重量仅有几公斤)组成的一个理想团队,在发射时将能轻松放入飞船,到达目的地后也很容易分开和卸货。
据国外媒体1日报道,即使是在最有利的情况下,精密的探测车要在一颗环境恶劣的行星上登陆也会很困难。但是,如果你能像丢下一颗皮球那样,把一辆探测车扔到行星表面,不用担心它会被摔坏,结果又会怎样呢?美国宇航局艾姆斯研究中心的维塔斯-桑斯佩拉尔和艾德里安-阿古基诺正在设法通过他们的设计——一种被戏称为“超级球形机器人”的可以改变形状的遥控外骨骼,找到解决这个问题的办法。
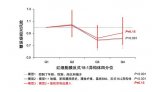
超级球形机器人(Super Ball Bot)的球形结构能在没有任何帮助的情况下进行着陆,吸收碰撞产生的巨大冲击力,并能减轻重量,因为别的方法需要携带降落伞和防撞气球。一旦成功登陆,它还能借助像球的结构在表面滚动,无需轮子,把延长和收缩连接刚性结构的缆绳当作推动力,向前移动。与之相同的缆索可以用来向后拉遥控设备的一部分,让位于中央的科研设备可以暴露在外,用于研究。这一设计彻底颠覆了现在正在使用的探测车的设计理念,例如“好奇”号,它采用的是更加传统的刚性遥控设备。然而超级球形机器人依靠的却是“张拉整体结构(Tensegrity)”,也就是说,它完全是由一组连续的压杆和缆索组成的。
美国宇航局形容张拉整体结构是一个有反直觉的张力结构,它没有刚性连接,但是“异常耐用、体重轻盈,而且能够展开”。张拉整体结构遥控设备没有单一的点会失灵,也没有轮轴或者铰链需要加固。碰撞产生的冲击力会被遥控设备的多个面分散。按照惯例,这些与众不同的结构会很难控制,因此研究人员正在尝试借助机器学习算法和灵感来源于神经系统学的操作方法“中枢模式发生器”操控它们。阿古基诺告诉《IEEE波谱杂志(IEEE Spectrum)》的雷彻尔-康特兰兹,他们必须发明新的操控方法,这样遥控设备才能平稳、有效地在行星表面运行。
这个设计可能会被用在土星的卫星——土卫六的一项任务中。把遥控设备收缩成一个更小的结构,科学家就能把更多设备装入一艘飞船,对这颗卫星的更多表面进行研究。美国宇航局认为,超级球形机器人能从距离土卫六超过62英里(99.78公里)的高度安全着陆,不会有任何损毁。就目前而言,任何星际探险都需要再等数年时间才能进行,但是这个科研组已经获得该局的许可,可以继续他们的研究。
-
焦点事件

-
焦点事件