理化所等提出实现液态金属大尺度可逆变形机制
近期,中国科学院理化技术研究所与清华大学联合研究小组在《科学报告》(Zhang et al., Scientific Reports, 2014)上报道了首次发现的旨在实现液态金属物体大尺度可逆变形的化学-电学协同控制机制SCHEME (Synthetically Chemical-Electrical Mechanism)。这是该小组继发现可变形液态金属基本现象(Sheng et al., Advanced Materials, 2014, 封面文章)之后的又一重要发现。相比于此前的单一性电学控制,SCHEME方法成功实现了液态金属材料的大尺度可逆变形,使得向柔性智能机器的研制又迈进了关键一步。
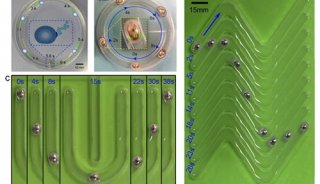
在这篇题为Synthetically chemical-electrical mechanism for controlling large scale reversible deformation of liquid metal objects (《通过化学-电学协同机制控制液态金属物体的大尺度可逆变形》)的研究论文中,作者们引入了酸、碱类电解质溶液,揭示了结合电场控制下的液态金属镓在球体和非球体之间的各种可逆转换行为,探明了其中的SCHEME机制及影响因素。研究表明,由于纯镓表面张力极大(约700mN/m),意味着可在平坦表面上保持球体形态;而氧化镓表面张力则趋近于0,因而可因重力和电学的双重作用而沿水平方向大幅展开。在酸或碱类电解液中,通过加电作用,镓球表面会迅速产生一层氧化镓薄膜,这使其表面张力发生突降,由此实现展开乃至分裂效应;一旦切断电压,之前形成的氧化镓层随即被电解液溶解,从而将纯镓再度暴露于化学溶液中,液态金属物体的表面张力于是自动恢复,变形体随即收缩成最初的球体形状,分裂的液态金属则自动融合。如此,通过变换电压大小和电解液浓度,可以调控液态金属镓的表面张力,进而实现对应的变形和离散幅度,这些基础发现为研制液态金属类柔性机器提供了关键技术支持。
研究还揭示出,在通电过程中若同时改变电极位置,则液态金属会朝向电极生长和移动。该小组今年年初的研究曾表明,虽然通过单一的电场控制(如溶液为纯水情况),也可借助电极极性的切换(对应液态金属表面氧化、还原反应过程)实现可逆变形,但变形幅度偏弱。与此不同的是,基于SCHEME机制的液态金属则在响应速度和变形幅度上展示出显著优势。此外,若调整电场的时空特性如采用正弦电压供电,还易于实现类似于心脏搏动那样的液态金属往复式可逆变形行为,已可直接作为泵来使用;而借助电极响应,还能制作出对应的阀。系列实验也表明,这些变形并不仅限于单质液态金属镓,二元、三元乃至更复杂组分合金如镓铟、镓铟锡、镓铟锡锌等也易于呈现对应的可逆变形行为,而单质金属试验可更清晰地揭示其中最根本的SCHEME机制。从技术角度而言,若借助电脑编程来调控电压大小与供电方式、电极间距与排列组合方式、液态金属体积及流道材料与形状,乃至电解质溶液类型与浓度等,则可以获得千奇百怪的变形行为,这在很大程度上印证了科幻电影《终结者》中所演绎的那种液态金属机器人的超级变形能力。上述系列液态金属可逆变形效应的发现有重要的科学意义和实用价值,首次系统地阐明了通过多场效应的协同作用机制,可精确调节液态金属的表面张力继而实现灵巧操控,由此奠定了实现大尺度可逆变形液态金属物体的理论基础,将大大加速柔性智能机器的研制进程。
当前,软体机器人作为新一代机器类型,相应研究正处于如火如荼的起步阶段,寻找其中的活性物质和控制机制至为关键。液态金属作为一大类全新功能材料,在通向高性能柔性执行器的道路上已表现出内在优势。以上液态金属可逆、可控变形效应的发现,特别是对SCHEME机制的阐明,为今后发展软体机器人技术指出了新的方向。若将这类可逆变形单元采用柔性材料予以封装,并将特定微电子芯片嵌入特殊设计的分布式阵列中,则可望研制出基于液态金属材料及SCHEME机制的柔性机器人。特别地,结合未来的人机接口技术,这类软体机器人在医疗健康领域也会大有作为。
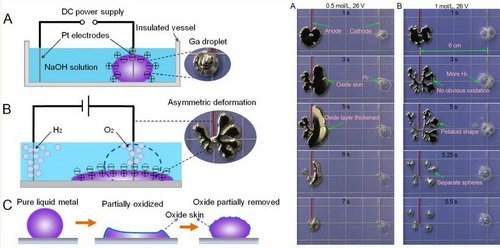
图为基于SCHEME原理的液态金属在NaOH溶液中的可逆变形机制与响应行为
-
科技前沿

-
精英视角

-
项目成果

-
项目成果