心理所揭示手部运动控制和适应新机制
在我们的日常生活中,对外部环境的感知觉十分重要,同样重要(甚至更为重要)的是如何利用这些感知觉去引导和控制我们的每一个动作行为。感知觉引导的动作行为是一切日常活动的基础,是人和动物基本的生存技能。比如,看到桌子上有一个水杯,你伸手端起杯子并把它送到嘴边,这就是一个视觉引导手部动作的例子。看似简单且毫不费力的行为背后却有着复杂的控制过程,动作控制可以灵活调整以适应周围环境的变化(如目标物位置发生改变)。动作适应性一般呈现两种方式:一是在动作执行过程中根据视觉反馈进行在线的调整;二是利用前一次的动作误差反馈调整当前运动的规划也可以达到补偿的目的。以前的研究大多数采用操控动作的动态参数(如方向偏移)或动力学特性(如增加阻力)等来考察动作适应的特性,一般认为,动作适应过程可以用运动控制的自适应理论体系来解释。但是,中国科学院心理研究所的研究结果却对这一传统的理论体系提出了挑战。他们的实验表明,现有理论体系尚不完整,它不能很好地解释动作控制在正向视觉反馈情形下的特性。这里,“正向”表示视觉反馈与实际情况刚好相反。比如,手实际向右运动,视知觉感知手却在向左运动。从控制理论的角度来说,这是一种不稳定的系统,不同于常规的负反馈稳定系统。心理所的研究成果详细地描述了在这一特殊情形下动作控制的特点及其适应特性。
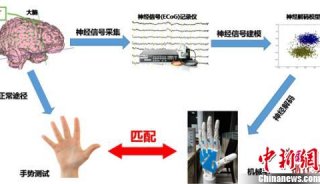
该研究以人类被试为研究对象,考察用手触摸这一特定动作行为在正向视觉反馈条件下的控制与适应情况。他们采用高精光学器件对被试的视觉输入进行左右镜像颠倒。同时,运动捕捉系统帮助科研人员采集被试们手部运动轨迹的3D位置数据。整个试验流程分为棱镜穿戴前、中、后三个部分。他们发现,与正常视觉(穿戴前)条件相比,棱镜视觉下手动轨迹的波动显著增大,运动终点与目标的误差也较大。在近一个小时的重复训练下,这些波动和误差并没有明显的变小 。同时,棱镜穿戴和训练对运动起点(即运动规划)的影响几乎没有。除了动作起点和终点,研究人员另外重点考察了整个运动轨迹的特点。他们采用了两种常用的轨迹分析方法来量化手部动作的控制程度。结果一致表明,在棱镜视觉条件下,手部动作的控制水平骤降,且骤降仅仅发生在运动轨迹的后段(当被试能看到视觉反馈时)。另外,重复训练可以逐渐改善被试对动作的控制能力,但这些改善及其缓慢,数百次训练后(约一小时)的控制水平还远远不能达到棱镜前的基准水平,这与常规情形下动作适应往往只需要几次或十多次的训练即可恢复形成鲜明的对比。这些训练对动作控制水平的影响同时发生在运动轨迹的前段(无视觉反馈)和后段(有视觉反馈)。研究人员推测,动作控制的骤降可能是正向反馈系统下的一种最优工作方式,因为在此情形下,控制得越多则错误越大,因此运动系统可能关闭了常规的自适应控制模式;当重复训练发生时,系统则谨慎启动原有的内部自适应控制模式,因而训练对整个运动轨迹均产生了影响(不依赖视觉反馈存在与否)。
该研究成果受心理所青年人才科研启动基金(No.Y3CX112005)资助。
-
项目成果
-
科技前沿
-
项目成果