


400-6699-117转7795
咨询列表
北京卓立汉光仪器有限公司
您好,欢迎您查看分析测试百科网,请问有什么帮助您的?
分析测试百科网 认证会员,请放心拨打!

| 参考报价: | 面议 | 型号: | HXP-824A |
| 品牌: | 卓立汉光 | 产地: | 北京 |
| 关注度: | 972 | 信息完整度: | |
| 样本: | 典型用户: | 暂无 |
诚信认证:
工商注册信息已核实! 扫一扫即可访问手机展台
扫一扫即可访问手机展台
400-6699-117转7795
产品概述
说明:
HXP系列六轴并联机器人系统主要用于高精度的六自由度调整,尤其适合于空间精密对位、微小器件加工和装配、光通信器件调芯、晶片检验等场合。
机械主体采用六个推杆+双虎克铰结构,具有刚性强、重复定位精度高、可任意位置安装等特点。推杆采用绝对定位型电机驱动,失电后保持位置信息,重启后无需归零。电机驱动系统采用标准工业总线EtherCAT进行通信,可靠性高、通信效率高,兼容市场上主流运动控制系统。
控制系统与软件支持各种欧拉角空间变换制式、支持机器人运行空间坐标系管理(包括世界坐标系、工件坐标系(64组)、机器人安装坐标系、机器人驱动坐标系、机器人工具坐标系(64组)的设置和转换)、支持载荷模拟、具有机器人空间校准功能、支持3D姿态仿真模拟、示教方案等功能。提供二次开发包,可以根据实际应用,整合成系统设备。
命名规则:

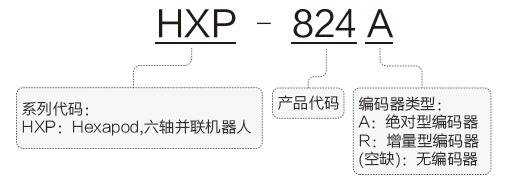


HXP系列六轴并联机器技术规格:(本系列产品为设计规格,技术指标以最终发布内容为准)
机器人参数
|
机器人型号 |
HXP-824A |
|
行程X、Y(mm)* |
±34 |
|
行程Z(mm)* |
±15 |
|
行程θx、θy(°)* |
±11 |
|
行程θZ(°)* |
±25 |
|
推杆分辨率(μm) |
0.25 |
|
最小位移X、Y(μm)** |
1 |
|
最小位移Z(μm)** |
0.5 |
|
最小位移θx、θy、θz(μrad)** |
12 |
|
回程X、Y(μm)** |
3 |
|
回程Z(μm)** |
1 |
|
回程θx、θy(μrad)** |
20 |
|
回程θz(μrad)** |
25 |
|
单项重复精度X、Y(μm)** |
±0.5 |
|
单项重复精度Z(μm)** |
±0.3 |
|
单项重复精度θx、θy(μrad)** |
±2 |
|
单项重复精度θz(μrad)** |
±2.5 |
|
最大速度X、Y、Z(mm/s) |
80 |
|
最大速度θx、θy、θz(mrad/s) |
800 |
|
额定速度X、Y、Z(mm/s) |
50 |
|
额定速度θx、θy、θz(mrad/s) |
500 |
|
水平负载(Kg) |
10 |
|
任意方向负载(Kg) |
2.5 |
|
电机类型 |
步进伺服电机 |
|
工作温度范围(℃) |
+10 ~ +40 |
|
主体材料 |
不锈钢/铝合金 |
|
质量(Kg) |
12 |
|
电缆长度(m) |
2 |
*注:原点处行程
**注:实测典型值
控制器参数
|
控制器名称 |
TMC-LAN-HXP |
|
额定电压(V) |
AC 220 |
|
额定电流(A) |
1.5 |
|
额定功率(W) |
350 |
|
处理器 |
Intel x86 2.0GHz,4cores |
|
程序存储器 |
16GB Flash DOM盘 |
|
内部主存储器(RAM) |
2GB DDR3 |
|
掉电存储 |
1Mbit铁电存储器 |
|
通信接口 |
EtherCAT通信接口,RJ45插座 1个; 标准以太网通信口,RJ45插座 1个; USB Host 1个;
HDMI高清显示接口 1个;
|
|
IO接口 |
DIx.0-DIx.7,通用数字量输入,8x2个; DOx.0-DOx.7,通用数字量输出,8x2个; AIx.0-AIx.3,可变量程模拟量输入,4个; AOx.0-AOx.3,可变量程模拟量输出,4个;
|
|
操作系统 |
WINDOWS CE |
|
工作温度范围(℃) |
0 ~ +55 |
HXP系列六轴并联机器人信息由北京卓立汉光仪器有限公司为您提供,如您想了解更多关于HXP系列六轴并联机器人报价、型号、参数等信息,欢迎来电或留言咨询。
注:该产品未在中华人民共和国食品药品监督管理部门申请医疗器械注册和备案,不可用于临床诊断或治疗等相关用途






