天宫二号紫外前向光谱仪大气临边高度计算
摘要: 天宫二号紫外前向光谱仪是一种对全球中层大气进行大气痕量气体垂直分布探测的新型光谱仪,在对大气痕量气体进行反演中,需要高精度地计算观测大气的高度参数等几何位置参数。本文针对该光谱仪的几何成像特点,设计并提出了一种高精度的大气高度的计算方法。首先,计算传感器坐标系下的观测矢量;其次,利用平台的轨道参数、姿态及成像时间等成像几何参数,推导出传感器坐标系到地心固定坐标系的转换矩阵,同时将观测矢量转换到地心固定坐标系下;再次,以标准地球椭球体为基准,建立经过临边切点的虚拟椭球体模型,并计算切点的地理坐标;最后,依据切点坐标推导出切点的临边高度。与理论值对比分析,在相同地球临边高度对应的散射光谱幅亮度分布保持一致,并且与美国OMPS载荷反演的O3结果进行定位误差分析,高度误差小于1 pixel,在2 km范围内,从而验证了本文所提算法的可行性和正确性。
关键词: 天宫二号 紫外前向光谱仪 临边高度 坐标转换
High precision limb height calculation of ultraviolet forward spectrometer of TianGong-2
Abstract: TianGong-2 ultraviolet forward spectrometer is a new type of spectrometer to detect the vertical distribution of atmospheric trace gases in the middle atmosphere of the world. In view of the geometric imaging characteristics of the spectrometer, a high precision calculation method of atmospheric altitude was proposed in this paper. Firstly, the observation vector in the sensor coordinate system was calculated. Secondly, the transformation matrix of the sensor coordinate system to the geocentric fixed coordinate system was derived by using the geometrical parameters such as orbital parameters, attitude and imaging time of the platform, and the observation vector was transformed into the geocentric fixed coordinate system. Thirdly, based on the standard earth ellipsoid, the virtual ellipsoid model through the tangent point was established and the geometric coordinates of the tangent point were calculated. Finally, the limb height was derived according to the tangent point coordinates. The luminance distribution of the scattered spectral spectrum is consistent with the theoretical value at the same limb height, and compared with the O3 results of OMPS inversion in the United States, the height error is within 2 km, which verifies the feasibility and correctness of the proposed algorithm.
Key words: TianGong-2 ultraviolet forward spectrometer limb height coordinate transformation
1 引言
紫外前向光谱仪是搭载在天宫二号空间实验室上的一种对全球中层大气进行大气痕量气体垂直分布探测的新型光谱仪[1]。结合紫外环形成像仪,其实现了垂直对地的天底探测和对地球切线方向的临边多方位探测组合及反演对比,实现了对地球大气多方位、高光谱、多时空分辨率观测,将为地球大气环境探测和空间物理研究方面提供新的信息源,达到比一般临边探测更高水平的层析反演,在国际上是首创。
目前,国际上类似的紫外临边大气观测载荷,比如NASA于2011年发射的Suomi极地轨道伴随卫星搭载的第二代反向散射紫外辐射传感器(Ozone Mapping and Profiler Suite,0MPS)[2-3]、欧空局ENVISAT-1上的大气层制图扫描成像吸收频谱仪(Scanning Imaging Absorption Spectrometer for Atmospheric Cartography, SCIAMACHY)[4]、Aura卫星上的OMI传感器[5]等,均通过天底、临边和掩星多种观测方式,观测整层、对流层、平流层地球大气和表面的后向散射辐射,进而反演大范围痕量气体分布情况。数据产品以HDF5格式封装,其中几何位置参数包括临边点高度、太阳高度角和方位角、平台观测角和方位角等。
观测的中层大气的几何位置参数,尤其是高度参数的计算,是进行大气痕量气体垂直分布反演的关键位置信息,高精度的高度参数是精确地反演出大气痕量气体垂直分布的前提。但截至目前,相关文献只是对产品的辐射定标及反演的大气成分的准确性进行分析,基本不涉及几何定位参数计算方法的介绍。Rich McPeters介绍了OMPS的辐射定标及L1b和L2级产品生产[6, 7];Lelli L等对SCIAMACHY的数据产品的云顶高度精度进行了评估,但没有介绍云顶高度的计算方法[8];Choi S等分析了云层对臭氧层监测仪(OMI)反演臭氧廓线的影响[9];Ma M等分析了臭氧监测仪器(OMI)得到的总臭氧柱的准确性,结果表明臭氧数据和地面测量数据之间的一致性非常好[10]。
几何定位方法主要是基于严格的成像几何关系或者通用成像模型进行几何定位[11-12]。本文针对天宫二号紫外前向光谱仪的几何成像特点,设计并提出了一种基于轨道参数、平台姿态、成像时间等几何参数的高度参数严格计算方法。首先,计算传感器坐标系下的观测矢量;其次,利用平台的轨道参数、姿态及成像时间等成像几何参数,推导出传感器坐标系到地心固定坐标系的转换矩阵,同时将观测矢量转换到地心固定坐标系下;再次,以标准地球椭球体为依准,建立经过临边切点的虚拟椭球体模型,并计算切点的地理坐标;最后,依据切点坐标推导出切点的临边高度。通过大气光谱幅亮度值与理论值比较分析,相同临边高度所对应的光谱辐亮度分布保持一致,并且与美国OMPS载荷反演的O3结果进行定位误差分析,高度误差在2 km范围内,小于1个像元(3 km)的设计误差值,满足紫外前向光谱仪中层大气层反演的高度参数的精度要求,验证了所提算法的可行性和正确性。
2 天宫二号紫外前向光谱仪介绍
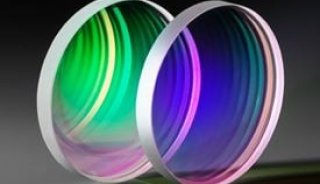
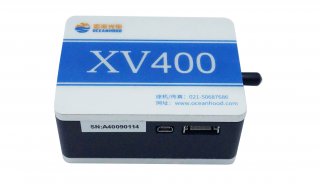
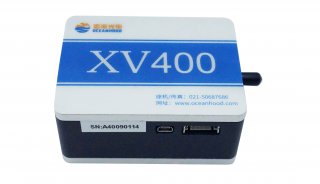
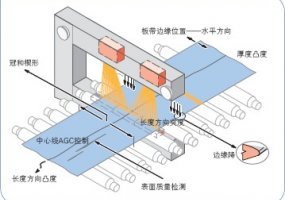
天宫二号紫外前向光谱仪是一种新型对全球中层大气进行大气痕量气体垂直分布探测的光谱仪,如图 1所示。该光谱仪采用光谱范围为290~1 000 nm、光谱分辨率最小达到1.8 nm、垂直分辨率优于3 km的成像技术指标,视场角水平方向为0.02°,高度方向为2.4°,对临边高度范围为10~60 km的全球中层大气进行各谱段、切片式综合探测,具有大气测量、背景测量、太阳定标、掩日测量等观测模式,探测原理如图 2所示。
3 紫外临边观测大气临边高度计算
大气临边观测的切点高度的计算过程是利用轨道参数、平台姿态、成像时间等成像几何参数,通过将传感器坐标系下的观测矢量转换到地心固定坐标系下,并计算观测矢量与虚拟椭球体的交点的大地坐标,从而推导出临边切点高度参数。紫外前向成像仪对大气临边观测的切点高度位置参数示意如图 3所示。
3.1 传感器坐标系下观测矢量计算
传感器坐标系(Sensor Coordinate System, SCS):原点O在传感器的投影中心,ZSCS轴由原点指向主光轴,XSCS轴平行于本体坐标系的XBODY轴,YSCS轴是XSCS轴和ZSCS轴的叉乘,遵从右手法则的笛卡尔坐标系,如图 4所示。假设在YOZ平面内与ZSCS轴的夹角,在YZ象限为正(YSCS方向为+90°),在-YZ象限为负(-YSCS方向为-90°)。
传感器坐标系下观测矢量如下:
其中,View为传感器坐标系下观测矢量,α为YOZ平面与ZSCS轴的夹角。
3.2 传感器坐标系向地心固定坐标系的转换
传感器坐标系下的观测矢量向地心固定坐标系转换的关键是转换矩阵的建立。利用传感器安装位置参数,地心固定坐标系下的轨道和速度、平台姿态等信息,实现从传感器坐标系下的观测矢量向地心固定坐标系的坐标转换。
(1) 传感器坐标系到本体坐标系的转换
本体坐标系(Body Coordinate System, BODY)原点在航天器的质心,XBODY轴、YBODY轴、ZBODY轴分别取卫星的三个主惯量轴。XBODY轴沿着平台横轴,YBODY轴沿着纵轴指向卫星方向,ZBODY轴按照右手法则确定,如图 4所示。
传感器坐标系相当于沿本体坐标系x轴顺时针旋转θ度,故转换矩阵为:
(2) 本体坐标系到轨道坐标系的转换
轨道坐标系(Orbital Coordinate System, ORB):原点在航天器的质心,ZORB轴从原点指向地球的质心,YORB轴是ZORB轴和航天器瞬时速度的叉乘积,XORB轴是YORB轴和ZORB轴的叉乘积,遵从右手法则的笛卡尔坐标系统,如图 5所示。
设φ,θ,ψ分别为平台横滚角、俯仰角和偏航角,按照ZBODY轴、XBODY轴、YBODY轴的顺序旋转,得到本体坐标系到轨道坐标系的转换矩阵:
总的转换矩阵为:
(3) 轨道坐标系到地心固定坐标系的转换
地心固定坐标系(Earth Centered Earth Fixed Coordinate System, ECEF):是一种空间固定的坐标系,其原点在地球的质心,ZECEF轴从坐标原点指向平均北极点,XECEF轴从原点指向本初子午线和赤道的交点,YECEF轴是ZECEF轴和XECEF轴的叉乘积,如图 5所示。
从轨道坐标系到地心固定坐标系之间的转换关系依靠在地心固定坐标系下的轨道坐标和飞行速度矢量进行描述,转换矩阵的构建方式如下:
旋转矩阵的3个分量为:
最终转换矩阵为:
式中:P为平台位置矢量,V为平台的飞行速度矢量。
最后,在地固坐标系上的观测矢量为:
3.3 几何定位参数解算
紫外临边成像光谱仪对大气临边观测的位置参数计算,实质上是求解观测视线与虚拟椭球体的切点的位置信息。
图 6为一条成像光线与虚拟椭球体相切的示意图,切点为点p。
3.3.1 定位方程的建立
(1) 虚拟椭球体和观测矢量的交叉点
虚拟椭球体和观测矢量的交叉点,即为图 6中的位置。成像仪的切点位置矢量PECEF,观测矢量VECEF,切点位置矢量PECEF,三者之间满足如下表达式:
其中s为观测矢量尺度。
(2) 虚拟椭球体方程
通常情况下,虚拟椭球模型是在标准地球椭球体的长半轴和短半轴参数基础上等值(设为Δa)扩大,并且认为目标点处的高度h=Δa,点P为目标点,点P′为目标点对地球表面的投影,如图 7所示。这样建立的虚拟椭球体的扁平率发生改变,并且由于椭球扁平特征, 切点处的高度h并不等于Δa,带来一定的定位误差。
为了减少这种定位误差,按如下规则建立虚拟椭球模型:首先,以标准地球椭球模型为基准,等扁率向外拓展,如图 7所示。虚拟椭球模型方程为:
3.3.2 定位方程的求解
假设a′=a+Δa,b′=(1-e)(a+Δa),那么,
联合公式(14)、(15)简化并重组得到一个关于尺度s和Δa的方程:
设该方程是以尺度s为自变量的一元二次方程,其中Δa为参数,为矢量点乘运行符。由于观测矢量与虚拟椭球体相切,即观测矢量与虚拟椭球体表面只有一个交点,故该方程的Δ=0,即:
利用牛顿-拉弗森数值解法迭代求解此非线性方程,获得参数值Δa。代人方程求解s, 应用s求解P点直角坐标(x, y, z)。
3.3.3 临边观测大气高度参数推导
目标点大地高度值与投影点P′、切点P点之间存在如下关系,如图 8所示。临边观测大气高度参数的计算步骤如下。
(1) 由P点的地球中心直角坐标系可得P点的大地经纬度坐标:
(2) 由于大地纬度为latd和中心纬度lat存在如下关系:
点P′的直角坐标(xa, ya, za)满足如下关系:
(3) 根据高度值h、投影点P′、点P之间关系,求解高度值h:
4 验证及误差分析
由于无法直接在大气临边高度处选取控制点进行定位精度分析,故本文采用间接法进行验证。利用2016年9月22日获取的紫外前向光谱仪数据,进行初步的定位精度验证。其成像时间为北京时间18点55分0秒~19点38分40秒,共1 137帧,取其中第500帧大气光谱幅亮度数据值为z轴,计算的对应高度作为Y轴,光谱范围(290~990 nm)作为X轴,曲面如图 9所示。
利用大气光谱幅亮度与理论值进行比较,形成大气光谱幅亮度与理论值的分布图(如图 10所示),对比分析可知,地球临边高度对应的散射光谱幅亮度分布与理论幅亮度分布保持一致,满足紫外前向光谱仪的中层大气层反演的高度精度要求,间接验证了所提算法的可行性和正确性。
选取在2个不同临边切点处,(点1纬度:-42.159,经度:20.982;点2纬度:-32.257,经度:78.581),随高度变化反演的O3产品廓线,与美国OMPS反演对比曲线,如图 10,通过对比分析,高度参数相对定位误差在2 km范围内。
临边高度的定位误差来源涉及很多方面,主要有平台位置速度误差、系统时间误差、像元观测角度误差、临边切点经纬度及成像处理引入的误差等。下一步重点分析误差源对定位误差的影响大小,进一步提高临边高度的定位精度。
5 结论
本文针对天宫二号紫外前向光谱仪的几何成像特点,设计并提出了一种大气临边高度参数计算方法,其误差小于1 pixel,在2 km范围内,满足中层大气光谱幅亮度进行大气参数反演的观测高度精度需求。因此,在需要计算临边高度等几何信息的遥感数据预处理领域有一定的借鉴意义。
参考文献
| [1] | 魏京华. 我国首个空间实验室天宫二号发射成功[J]. 中国航天, 2016(10): 9-9. |
| [2] | FLYNN L E, SEFTOR C J, LARSEN J C, et al. . The Ozone Mapping and Profiler Suite[M]//Earth Science Satellite Remote Sensing. Springer Berlin Heidelberg, 2006. |
| [3] | DAS B, WOLF W, FLYNN L E, et al. . Testing and integration of JPSS Ozone Mapping and Profiler Suite (OMPS) algorithms using the Algorithm Development Library (ADL)[C]. international geoscience and remote sensing symposium, 2015: 4897-4900.https://ieeexplore.ieee.org/document/7326929/ |
| [4] | BOVENSMANN H, BURROW J P, BUCHWITZ M, et al. SCIAMACHY:mission objectives and measurement modes[J]. Journal of the Atmospheric Sciences, 1999, 56(2): 127-150. DOI:10.1175/1520-0469(1999)056<0127:SMOAMM>2.0.CO;2 |
| [5] | PAWAN K BHARTIA. OMI Ozone Products[R]. NASA Goddard Space Flight Center, Greenbelt, Maryland, USA, 2002. |
| [6] | Rich McPeters. The version 2 processing of data from the OMPS nadir mapper and profiler. [S/OL]. https://ozoneaq.gsfc.nasa.gov/legacyomps/media/presentations/rich_mcpeters_STM_2015-12-03. |
| [7] | Rich McPeters. SNPP OMPS-NM Spectral Measurements: Calibration and Comparison[S/OL]. https://ozoneaq.gsfc.nasa.gov/legacyomps/media/presentations/kai_yang_STM_2015-12-01. |
| [8] | LELLI L, WEBER M, BURROW J P, et al. Evaluation of SCIAMACHY ESA/DLR cloud parameters version 5.02 by comparisons to ground-based and other satellite data[J]. Frontiers in Environmental Science, 2016. |
| [9] | CHOI S, BAK J, KIM J, et al. Analyses of the OMI cloud retrieval data and evaluation of its impact on ozone retrieval[J]. Atmosphere, 2015, 25(1): 117-127. DOI:10.14191/Atmos.2015.25.1.117 |
| [10] | MA M, SHI R, GAO W, et al. Validation of the OMI-TOMS and OMI-DOAS total ozone column data using ground-based observations over China[J]. Proceedings of SPIE, 2015. |
| [11] | 郭文月, 余岸竹, 刘海砚, 等. 正则化总体最小二乘用于光学线阵遥感影像定位[J]. 光学 精密工程, 2017, 25(1): 236-244. |
| [12] | 乔川, 丁亚林, 许永森, 等. 大角度倾斜成像航空相机对地目标定位[J]. 光学 精密工程, 2017, 25(7): 1714-1726. |