







工程热物理所在集群组合式柔性太阳能无人机研究获进展
临近空间太阳能无人机以大中型无人机为平台主体,飞行于数千米以上中高空及临近空间,具有展弦比大、留空时间长、任务范围大、效用广、生存能力强的特点,已成为当前国际国内工程和学术领域的热门研究方向。总体而言,一些关键技术难点仍需要进一步突破和验证。例如,太阳能无人机具有展弦比大,机翼载荷小的特点,易导致较大的挠度和变形,并存在可靠性低、载荷能力弱、机场起降条件严格等局限,亟须寻找新的突破方向。
融合高空长航时无人机两类平台的性能和任务优势,面向集群无人机创新发展,中国科学院工程热物理研究所发展出一种结构新型的组合式无人机(图1),将高空长航时和集群智能化相结合,旨在发展面向多类空域融合运用的技术体系和装备平台。组合式柔性太阳能无人机以低成本、高可靠、易群组的中小型太阳能无人机为基本单元,是数架单机通过柔性结构连接组成的协同整体,具有可拆分可重组特性,同时具有小型集群无人机和大型无人机的优势,可以实现模块化组合拆分,通过将多个小型太阳能无人机柔性组合成整体,形成超大翼展组合式太阳能无人机(图2)。科研人员针对不同状态下组合式太阳能无人机的气动特性进行了研究与分析(图3),并结合常规太阳能无人机的飞行策略,设计了一种以能源效用最大化为目标的组合式太阳能无人机飞行策略。研究结合该飞行策略提出了一种组合式太阳能无人机的航迹规划算法,解决了组合式太阳能无人机以任务为导向的航迹规划问题。将研究结果与传统常规布局太阳能无人机路径优化结果进行比较(图4),结果表明组合式太阳能无人机在昼夜能量闭环的前提下能够具有更多的任务优势,且该协同规划算法能够解决更复杂应用场景下的航迹规划问题。目前,实验室正在进行组合式缩比验证样机的总体设计及制造,下一阶段将开展组合式无人机的技术验证和试飞试验。
相关研究成果发表在Chinese Journal of Aeronautics上。研究工作得到国家自然科学基金的支持。

图1.组合式无人机的基本形式
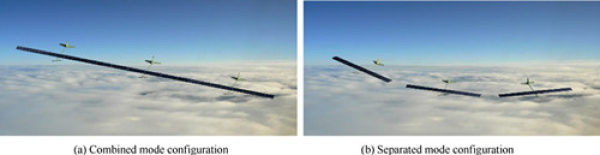
图2.组合式太阳能无人机
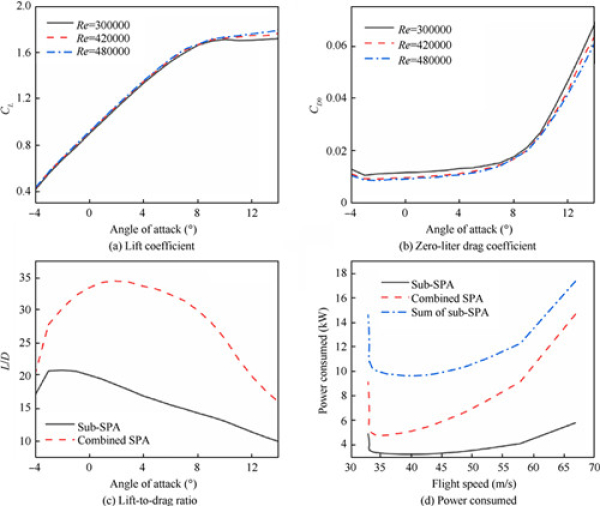
图3.组合式太阳能无人机气动性能分析
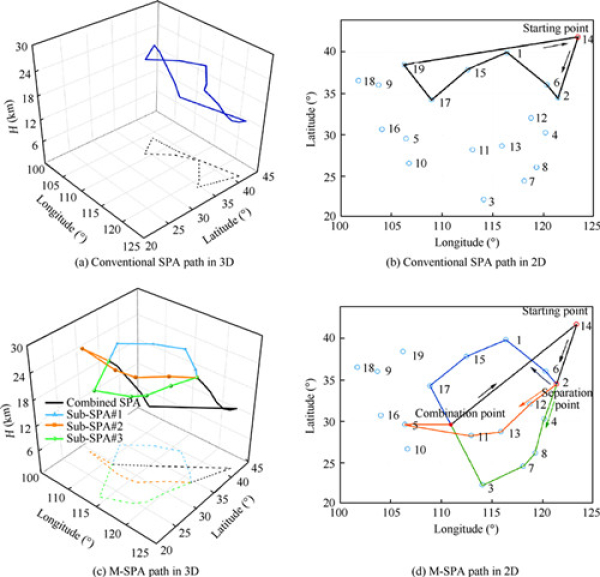
图4.组合式太阳能无人机路径规划
-
科技前沿
-
科技前沿



