激光雷达传感器在无人驾驶中的作用
近段时间以来,国内车企关于无人驾驶汽车的研发和测试捷报频传。先是吉利汽车宣布将在2022年亚运举办期间,在特定区域内使用完全无人驾驶的车辆。随后再有报道称,百度宣称其新一代无人巴士车阿波龙二代将很快推出。而就在不久前,百度与中国一汽红旗共同打造的国内首批量产自动驾驶出租车在湖南长沙展开了上路测试。有消息称,长沙市民有望在年底之前率先体验到中国首批自动驾驶出租车。无疑无人驾驶技术是一种解放人类双手和提高生产力效率的科技创新。
本文将着重介绍激光雷达传感器在无人驾驶中的作用及市场趋势。
无人驾驶的底层支撑可以分为三部分,即:传感器、高精地图和计算平台。在传感器方面,主流的传感器分为:摄像头、激光雷达和毫米波雷达。其作用如下:
1、摄像头
直接识别可见光,价格适中,技术成熟,可以识别行人、车辆、路标等物体,但易受视野、夜晚暗光、雨雪天气等因素影响。
2、激光雷达
探测角度广,精度高,厘米级精度的激光雷达结合高精地图可以实现高精度自定位和物体识别跟踪,定位可以精确到具体车道,但是价格昂贵,使用寿命较短。
3、毫米波雷达
测距离远,可以在雨雪天气等各种恶劣环境中稳定工作,但是精度不高。
无人驾驶用于控制的传感器要么是摄像头,要么是激光雷达,这是业界已经达成的共识。那何谓激光雷达?在无人机驾驶中的作用是什么?
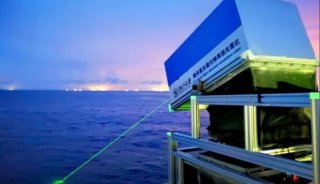
激光雷达的工作原理是利用可见和近红外光波(多为950nm波段附近的红外光)发射、反射和接收来探测物体。激光雷达可以探测白天或黑夜下的特定物体与车之间的距离。由于反射度的不同,也可以区分开车道线和路面,但是无法探测被遮挡的物体、光束无法达到的物体,在雨雪雾天气下性能较差。
激光雷达在无人驾驶运用中拥有两个核心作用。3D建模进行环境感知。通过雷射扫描可以得到汽车周围环境的3D模型,运用相关算法比对上一帧和下一帧环境的变化可以较为容易的探测出周围的车辆和行人。
-
焦点事件

-
科技前沿

-
科技前沿

-
焦点事件

-
焦点事件

-
市场商机
-
科技前沿
-
综述

-
并购

-
焦点事件

-
科技前沿
-
技术原理