







聚集诱导发光碳点凝胶的仿章鱼协同变形变色运动机器人
自然界中,许多生物通过进化,不断增强自身适应环境的能力,从而利用协同的形状变形、颜色变化和运动,拥有在不同环境中交流、伪装等能力。科学家尝试设计智能人工材料(特别是具有类生物组织性能的软湿聚合物凝胶)来复制多功能协同行为,这将有利于理解自然的多功能协同行为,并可整合和升级受生物启发的多功能机器人。然而,实现高等生物的三功能协同或多功能协同,如复杂的协同形状变形、颜色变化和运动,却颇具挑战性。
近年来,中国科学院宁波材料技术与工程研究所智能高分子材料课题组研究员陈涛与路伟,致力于智能荧光高分子水凝胶研究(ACS Nano 2021, 6, 10415;Cell Reports Physical Science 2021, 2, 100417;Aggregate 2021, 1, e37;Advanced Intelligent Systems 2021, 2000239;Angewandte Chemie International Edition 2021, 60, 8608;Angewandte Chemie International Edition 2021, 60,3640;Angewandte Chemie International Edition 2019, 58, 16243;Advanced Functional Materials 2019, 29, 1905514;Advanced Functional Materials 2018, 28, 1704568等)近日,科研人员受到自然界生物在不同环境中交流、伪装等能力的启发(例如,章鱼可通过改变形状和颜色伪装成珊瑚,当有威胁感知时,章鱼能从体管喷出水流,喷射的水力强劲,从而迅速向反方向移动逃跑,同时改变形状和皮肤颜色,融入周围环境),提出了新型多功能协同柔性机器人的制备策略。
科研人员提出利用具有可旋转表面基团的疏水碳点,制备出具有聚集诱导发光功能的聚丙烯酰胺/丙烯酸/碳点凝胶,并将凝胶与弹性体界面结合,设计出具有非对称结构的溶剂响应型双层柔性驱动器。在该设计中,乙二醇双层柔性驱动器在水中会自发进行溶剂交换,导致凝胶的颜色从分散态蓝光转变为聚集态红光;利用双层驱动器两侧溶胀差异,可实现不对称弯曲形变。研究人员进一步将制备的双层柔性驱动器与单层凝胶推动器相连接,构建出具有类似章鱼的仿生柔性游泳机器人。该机器人可以协同形状/颜色变化,并可通过溶剂替换过程产生的表面张力梯度实现自主运动。该研究为开发先进的多功能仿生智能柔性机器人提供了良好的策略。
相关研究成果以Aggregation Induced Emissive Carbon Dots Gels for Octopus-Inspired Shape/Color Synergistically Adjustable Actuator为题,发表在Angewandte Chemie International Edition上。研究工作得到国家自然科学基金、中德合作国际交流项目、中科院前沿科学重点研究计划、中科院青年创新促进会和王宽诚教育基金等的支持。

图1 章鱼遇险时通过喷水迅速向反方向移动逃跑,同时改变它们的形状和皮肤颜色,以便于融入周围环境

图2 基于聚集诱导发光的聚丙烯酰胺/丙烯酸/碳点凝胶的刺激响应性荧光色变化
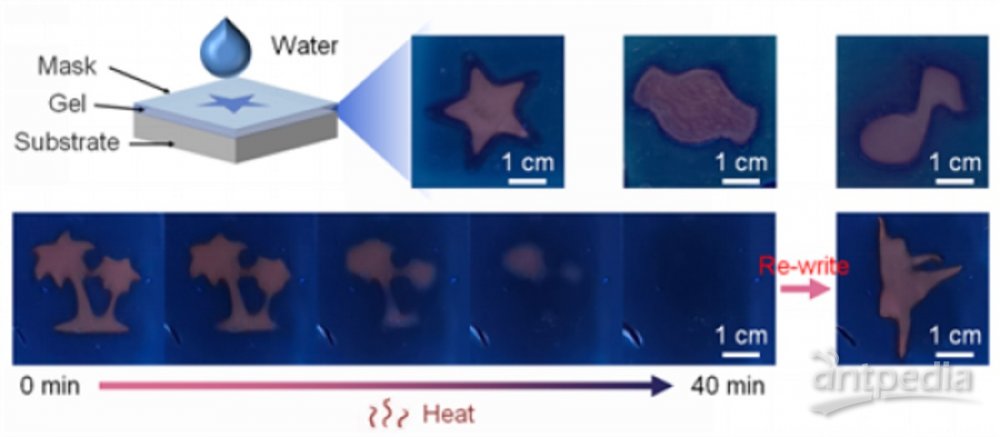
图3 该凝胶在图案化信息的写入和擦除领域的应用展示

图4 非对称结构的溶剂响应型双层柔性驱动器在溶剂交互刺激下的协同变形变色行为

图5 基于聚集诱导发光的聚丙烯酰胺/丙烯酸/碳点凝胶及其驱动器的仿生章鱼在溶剂交互刺激下的协同变形变色运动行为
