无人驾驶之激光雷达深度剖析(一)
无人驾驶汽车怎么实现自动驾驶呢?这背后一个关键技术就是LiDAR,即激光雷达传感器,俗称光达,它也被称为无人驾驶汽车的眼睛。
激光雷达,英文全称为Light Detection And Ranging,简称LiDAR,即光探测与测量,是一种集激光、全球定位系统(GPS)和IMU(Inertial Measurement Unit,惯性测量装置)三种技术于一身的系统,用于获得数据并生成精确的DEM(数字高程模型)。这三种技术的结合,可以高度准确地定位激光束打在物体上的光斑,测距精度可达厘米级,激光雷达最大的优势就是“精准”和“快速、高效作业”。它是一种用于精确获得三维位置信息的传感器,其在机器中的作用相当于人类的眼睛,能够确定物体的位置、大小、外部形貌甚至材质。
LiDAR通过测量激光信号的时间差、相位差确定距离,通过水平旋转扫描或相控扫描测角度,并根据这两个数据建立二维的极坐标系;再通过获取不同俯仰角度的信号获得第三维的高度信息。
高频激光可在一秒内获取大量(106-107数量级)的位置点信息(称为点云),并根据这些信息进行三维建模。除了获得位置信息外,它还可通过激光信号的反射率初步区分不同材质。
激光雷达是自动驾驶的关键技术
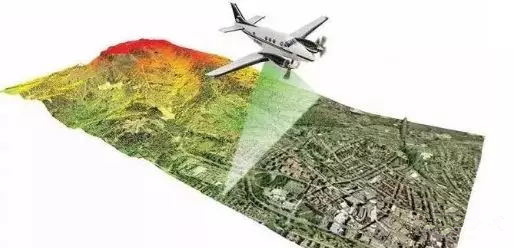
Lidar大致分为机载和地面两大类应用,其中机载激光雷达是一种安装在飞机上的机载激光探测和测距系统,可以量测地面物体的三维坐标。早在上世纪七十年代,由美国航天局研发,LIDAR测绘技术空载激光扫瞄技术开始了发展,并且速度飞快,约在1995年开始商业化。
除了军事领域的应用,激光雷达也迅速向民用市场扩展。其中,无人驾驶可以说是最热门的一个应用。
将Lidar应用于自动驾驶,要追溯到美国的DARPA (美国国防高等研究计划署),它每年都会举办无人驾驶汽车挑战赛,在2007年的DARPA挑战赛上,7支参赛队伍中的6支都采用了Velodyne公司设计的Lidar,最终的第一二名就出自这六只参赛队。这引起了准备研发无人驾驶车的谷歌的注意,之后谷歌组建了队伍,据称,最初的人员就来自这些参赛队员。谷歌于2009年推出无人驾驶汽车项目,在其无人车原型中使用的就是Velodyne公司的Lida。
激光雷达在无人车市场的应用
近几年,无人驾驶汽车市场发展火热,谷歌之后,百度、Uber等主流无人驾驶汽车研发团队都在使用激光雷达作为传感器之一,与图像识别等技术搭配使用,使汽车实现对路况的判断。
传统的汽车厂商也纷纷开始研发无人驾驶汽车,包括大众、日产、丰田等公司都在研发和测试无人驾驶汽车技术,他们也都采用了激光雷达。

激光雷达的特点
Lidar系统测量3D空间中每个像素到发射器间的距离和方向,通过传感器创造出真实世界完整的3D模型。操作Lidar系统的基本方法是发射一束激光,然后测量光在物体表面反射而返回来的信号。Lidar模块接收到反射回来的信号所需的时间提供了一种直接测量Lidar系统与物体之间的距离的手段。关于物体的额外的信息,比如它的速率或材料成分,也可以通过测量反射回来的信号中的某些特性而得以确定,这些特性包括诱导多普勒频移(induced Doppler shift)。最后,通过操控发射出去的光,可以测量出环境中许多不同的点,从而创建出完整的3D模型。

激光雷达(LiDAR)类似于雷达(radar),但是分辨率更高,因为光的波长大约比无线电的波长小10万倍。它可以区分真实移动中的行人和人物海报、在三维立体的空间中建模、检测静态物体、精确测距。
-
仪器推荐

-
仪器推荐

-
仪器推荐

-
仪器推荐

-
仪器推荐
 询底价 Tel:400-6699-117 转 3777
询底价 Tel:400-6699-117 转 3777