无人驾驶之激光雷达深度剖析(三)
激光雷达的分类
激光雷达按有无机械旋转部件分类,包括机械激光雷达和固态激光雷达。机械激光雷达带有控制激光发射角度的旋转部件,而固态激光雷达则依靠电子部件来控制激光发射角度,无需机械旋转部件。

机械激光雷达由光电二极管、MEMS反射镜、激光发射接受装置等组成,其中机械旋转部件是指图中可360°控制激光发射角度的MEMS发射镜。
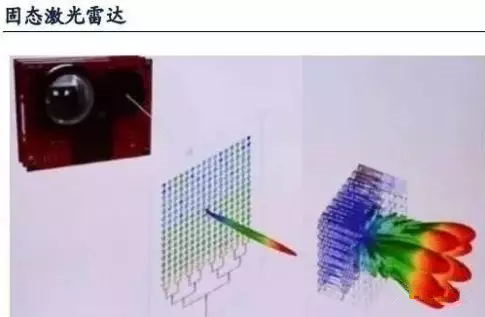
固态激光雷达与机械雷达不同,它通过光学相控阵列(OpticalPhasedArray)、光子集成电路(PhotonicIC)以及远场辐射方向图(FarFieldRadiationPattern)等电子部件代替机械旋转部件实现发射激光角度的调整。
光学相控阵和微波相控阵是一个原理,利用的是光的相干干涉,出现了相位差,也就出现了干涉峰。所以如何让通过器件后光产生相位差是研究的重点,这就需要找到合适的材料和激发方法。现在的激发方法主要是电光扫描,也就是通过加电使材料产生相位差。现在两种比较热,一个是光波导阵列,一个是MEMS器件的,MEMS器件这个优点是扫描的速度快,但是感觉不是那么必要,因为瓶颈还是在扫描角度这儿,所以现在MEMS原理的商业产品还没有看到。
光波导阵列通过加电方式来实现光束扫描,利用光波导电光效应,对波导芯层加载电压,使每个波导芯层具有不同的附加折射率,波束得以在波导阵元输出截面光场具有不同的附加相位差,相位差按一定规律分布可引起输出光速的偏转。通过相位差按照一定规律分布输出,从而实现光束的扫描。
固态激光雷达优势:响应速度快,控制电压低,扫描角度大,价格低。
由于内部结构有所差别,两种激光雷达的体积大小也不尽相同。机械激光雷达体积较大、价格昂贵、测量精度相对较高,一般置于汽车外部。固态激光雷达尺寸较小、性价比较高、测量精度相对低一些,但可隐藏于汽车车体内,不会破坏外形美观。

根据线束数量的多少,激光雷达又可分为单线束激光雷达与多线束激光雷达。
顾名思义,单线束激光雷达扫描一次只产生一条扫描线, 其所获得的数据为2D数据,因此无法区别有关目标物体的3D信息。不过, 由于单线束激光雷达具有测量速度快、数据处理量少等特点, 多被应用于安全防护、地形测绘等领域。
传统的激光雷达扫描视场非常小,如果想360度的观察周围,怎么办?最自然的办法就是多搞几束激光,线数越多覆盖的角度越大。

多线束激光雷达扫描一次可产生多条扫描线,目前市场上多线束产品包括4线束、8线束、16线束、32线束、64线束等,其细分可分为2.5D激光雷达及3D激光雷达。2.5D激光雷达与3D激光雷达最大的区别在于激光雷达垂直视野的范围,前者垂直视野范围一般不超过10°,而后者可达到30°甚至40°以上,这也就导致两者对于激光雷达在汽车上的安装位置要求有所不同。
激光雷达的参数指标
测量距离、测量精度、测量速率、角度分辨率是决定三维激光雷达性能的几个重要指标。

例如,在无人驾驶汽车这个应用领域,对激光雷达的探测距离是有要求的。比如说高速公路上要能够检测到前方车辆,还有在十字路口上,要能够观测马路对面的汽车。
有趣的是,精度不是越高越好。激光雷达获取的的数据可以进行障碍物识别、动态物体检测及定位,如果精度太差就无法达到以上目的;但是,精度太好也有问题,高精度对激光雷达的硬件提出很大的要求,计算量会非常大,成本也会非常高。所以精度应该是适中就好。
还有一点不能忽视的是角分辨率,角分辨率决定打出去后的两个激光点之间的距离。单点测距精度达到后,如果打到物体表面两点间距离(点位)太远,测距精度也就失去意义了。
激光雷达的机遇和挑战
机遇
激光雷达在智能机器生态系统中有很多机遇。与使用二维图像相比,点云能够更容易的被计算机使用,用于构建物理环境的三维形象——二维图像是人脑最容易理解的数据,而对于计算机来说,点云是最容易理解的。
二维激光雷达扫描器可在户外使用,并专为移动、低功耗应用而设计。它只用了竞争对手近四分之一的成本,这将给这类传感器带来全新的应用(我们在很多其他类型的传感器中已经看到过这样的现象)。 二维激光雷达也可以被搭载到另一个旋转的元件上以产生环境中完整的三维点云。

其他公司正在寻求降低系统成本的其他策略,例如Quanergy的固态激光雷达。该系统大体与上文已介绍的系统相同,然而,与使用旋转光学器件来移动光束不同的是,它们使用 “相控阵列光学系统”来引导激光脉冲的方向,它可以在某一方向上释放一个激光脉冲,而让下一个脉冲(1微秒之后)瞄准视野中的其它地方。
它能够实时关注视野范围内看似移动的物体,这是对人类驾驶员的模仿——后者能及时注意到即将进入汽车所行驶的道路的障碍物。Quanergy系统被设计为能在没有机械移动的情况下做到这一点,并且每秒采样大约100万个数据点——这与64线旋转激光雷达的速度相当,却能显著降低成本。它另一个优势是更容易被集成在反光镜和保险杠等其他汽车部件上。
另外,更大和功率更高的系统也正在开发中,它可以从在3万英尺高度飞行的飞机上对地面成像,其分辨率足以能够看到地面上的车辆。虽然这些系统的市场需求更小,且成本更高,但其发展将继续降低传感器技术的整体成本。
-
仪器推荐

-
仪器推荐

-
仪器推荐

-
仪器推荐

-
仪器推荐
 询底价 Tel:400-6699-117 转 3777
询底价 Tel:400-6699-117 转 3777