开尔文探针力显微镜的开尔文探针力显微镜
原子力显微镜(atomic force microscope,简称AFM),也称扫描力显微镜(scanning force microscope,SFM)是一种纳米级高分辨的扫描探针显微镜,优于光学衍射极限1000倍。原子力显微镜的前身是扫描隧道显微镜,是由IBM苏黎士研究实验室的海因里希·罗雷尔(Heinrich Rohrer)和格尔德·宾宁(Gerd Binnig)在上世纪80年代早期发明的,他们之后因此获得1986年的诺贝尔物理学奖。
格尔德·宾宁、魁特(Calvin Quate)和格勃(Gerber)于1986年发明第一台原子力显微镜,而第一台商业化原子力显微镜于1989年生产的。AFM是在纳米尺度操作材料,及其成像和测量最重要的工具。信息是通过微悬臂感受和悬臂上尖细探针的表面的“感觉”来收集的,而压电元件可以控制样品或扫描器非常精确的微小移动,用导电悬臂(cantilever)和导电原子力显微镜附件则可以测量样品的电流偏压;更高级的仪器则可以测试探针上的电流来测试样品的电导率或下表面的电子的移动,不过这种测试是非常艰难的,只有个别实验室报道了一致的数据。利用微悬臂感受和放大悬臂上尖细探针与受测样品原子之间的作用力,从而达到检测的目的,具有原子级的分辨率。由于原子力显微镜既可以观察导体,也可以观察非导体,从而弥补了扫描隧道显微镜的不足。
原子力显微镜是由IBM公司苏黎世研究中心的格尔德·宾宁与斯坦福大学的Calvin Quate于一九八五年所发明的,其目的是为了使非导体也可以采用类似扫描探针显微镜(SPM)的观测方法。原子力显微镜(AFM)与扫描隧道显微镜(STM)最大的差别在于并非利用电子隧穿效应,而是检测原子之间的接触,原子键合,范德瓦耳斯力或卡西米尔效应等来呈现样品的表面特性。
工作原理
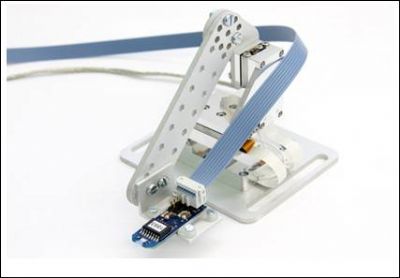
AFM的关键组成部分是一个头上带有一个用来扫描样品表面的尖细探针的微观悬臂。这种悬臂大小在数十至数百微米,通常由硅或者氮化硅构成,其上载有探针,探针之尖端的曲率半径则在纳米量级。当探针被放置到样品表面附近的地方时,悬臂上的探针头会因为受到样品表面的力而遵从胡克定律弯曲偏移。在不同的情况下,这种被AFM测量到的力可能是机械接触力、范德华力、毛吸力、化学键、取向力、静电力、磁力(见磁力显微镜)卡西米尔效应力、溶剂力等等。通常,偏移会由射在微悬臂上的激光束反射至光敏二极管阵列而测量到,较薄之悬臂表面常镀上反光材质( 如铝)以增强其反射。其他方法还包括光学干涉法、电容法和压电效应法。这些探头通常由采用压电效应的变形测量器而制得。通过惠斯登电桥,探头的形变可以被测得,不过这种方法没有激光反射法或干涉法灵敏。
当在恒定高度扫描时,探头很有可能撞到表面的造成损伤。所以通常会通过反馈系统来维持探头与样品片表面的高度恒定。传统上,样品被放在压电管上并可以在z方向上移动以保持与探头之间的恒定距离,在x、y方向上移动来实现扫描。或者采用一种“三脚架”技术,在三个方向上实现扫描,这种方法部分抑制了压电管扫描时所产生的扭曲效应。在较新的设计中,探针被装载在垂直压电扫描器上,而样品则用另外的压电结来扫描X和Y方向。扫描的结果z = f(x,y)就是样品的形貌图。
AFM可以在不同模式下运行。这些模式可以被分为静态模式(Static Mode,也称接触模式,Contact Mode),或其他一系列动态模式(Dynamic Mode,如非接触模式(Non-Contact Mode)、轻敲模式(Tapping Mode)、侧向力(Lateral Force Mode)模式)。