激光雷达原理秒懂
说到无人车,就不得不提到激光雷达,简称光达。在硅谷的小伙伴应该都见过光达。它就是无人车上不停旋转的那顶帽子。
特斯拉的老大Elon Musk声称,唯有特斯拉的车不需要激光雷达(lidar)。特斯拉只需用摄像头和雷达(radar)传感器,就可以做到像人眼一样观察四周路况。这真的可行吗?
秒懂光达原理
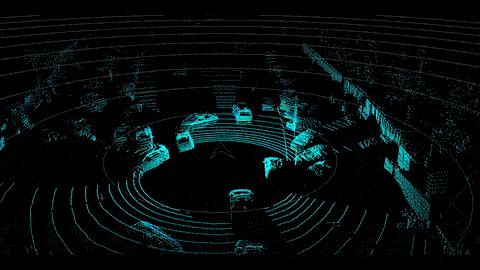
光达的原理类似于声呐。只不过这里我们用光代替声音,来衡量汽车与障碍物之间的距离。和蝙蝠靠回声定位一样,汽车向四周发射激光束,并通过反射回来的信号绘制出周围环境的3D模型。光达的英文是Lidar,拆开看就是:
Li:Light(光),光达发射出人肉眼无法看到的红外线。
d:detection(检测),靠发射出的激光束找到障碍物。
a:and
r:ranging(测距离),靠返回的光束判断物体距离。
光达:无人车的第二双眼睛
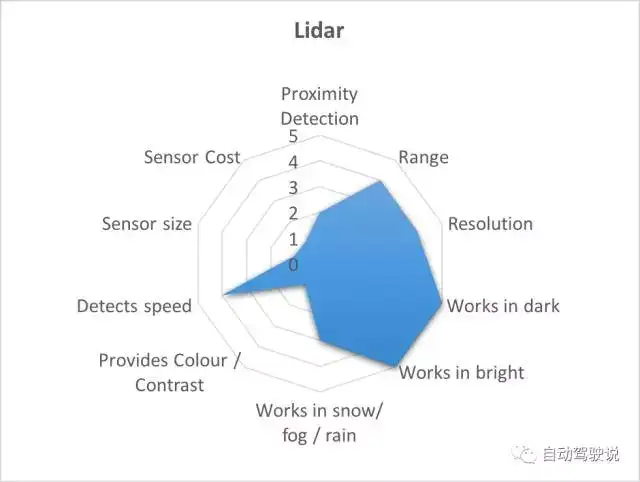
当前最好的光达可以识别距离百米之外、大小只有几厘米的物体,可以区分物体与行人,甚至可以辨别行人和汽车的移动轨迹和速度。谷歌、Uber等公司的无人车的感知系统都主要依赖于激光雷达。特斯拉既然说光达完全没有必要,我们就来看看,光达和摄像头,到底谁更厉害?
光达 PK 摄像头
Round 1. 基本原理
光达:计算激光束的反射时间和波长。
摄像头:将光学信号转化成数字图像信号。
Round 2. 成像
光达:完整绘制障碍物3D图像。
摄像头:必须根据2D图像判断/生成3D图像。
Round 3. 颜色识别
光达:无法辨别颜色。
摄像头:可辨别颜色。
Round 4. 摆放位置
光达:必须摆放在视野毫无阻挡的地方,所以常常放在车顶。这无疑降低了无人车的颜值。
摄像头:像人眼一样小的摄像头想摆哪里就摆哪里。
Round 5. 测绘和识别障碍物
光达:成像可视化程度低,障碍物识别准确率高。
摄像头:成像可视化程度高,障碍物识别准确率低。
Round 6. 测距离
光达:近,几米到二百米。
摄像头:远,可达几百米。
Round 7. 适合自然环境
光达:黑天也能看得清,影子也可识别,但受天气因素影响较大。
摄像头:下雾下雨也看得清, 但被外界光源强度所限制。
Round 8. 对计算机要求
光达:很低。
摄像头:很高,需要将2D图像转为3D。
Round 9. 硬件成本
光达:成本高,当今一个光达的成本已经从七万美元降到了一万美元。不过成本仍然是批量生产无人车的瓶颈。
摄像头:成本低。
九个回合下来,光达和摄像头不相上下,各有千秋。Elon Musk说激光雷达可以被取代的说法也确实很难让人信服。打造一辆完美的无人车,显然还是需要激光雷达的辅助。或许几年后,特斯拉可以研发出这样完美的传感器,不过到那时候,激光雷达的成本也会大大降低,特斯拉的成本优势也会被弱化。