研发基于多极磁镊的机器人细胞内部操作与测量系统
中国科学院自动化研究所研究员谭民领导的先进机器人团队与多伦多大学教授孙钰的先进微纳系统实验室合作在微纳机器人方面开展研究,研究基于多极磁镊的机器人细胞内部操作与测量,相关成果发表在Science Robotics上(Sci. Robot. (2019), 4, eaav6180)。
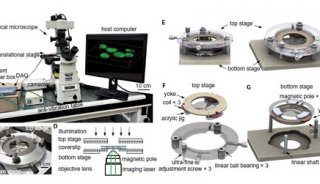
在细胞内部对其结构的直接操作和测量是理解亚细胞和亚组织活动的重要手段,可用于疾病诊断、发展新治疗方法。相对于细胞外部的操作而言,细胞内部的物理测量和操作仍然是未知领域,针对这一问题,合作团队研发了一种多极磁镊,使用亚微米尺度的磁珠进行纳米级定位和皮牛顿(pN,10-12牛顿)级的力控制,实现在单个胞内部的不同空间和时间的测量。为克服共聚焦成像的低带宽反馈问题,研发了一种广义预测控制用于位置控制,可实现0.4 μm的位置控制精度,仅仅略大于布朗运动的约束;同时可在30分钟以上施加60 pN的力,对于癌症细胞的细胞核特性进行了全面测量。系统对细胞的测量以及癌细胞的病变获一系列有意义的结果。系统的研制成功,可用于细胞力学与力传导特性的研究,并可进一步对磁珠附加某些化学功能,对细胞内组织进行化学传感。
谭民团队与孙钰团队在微纳操作领域有多年的深入合作,谭民团队研究员周超,曾与孙钰团队合作开展电子显微镜内部微纳操作机器人的研究,用于在细胞核内部的特定蛋白提取,其研究成果发表于Light: Science & Applications 上(Light: Science & Applications (2014) 3, e224)。

基于多极磁镊的机器人系统
推荐
-
焦点事件

-
标准
-
科技前沿
-
会议会展

-
企业风采

-
焦点事件
-
项目成果