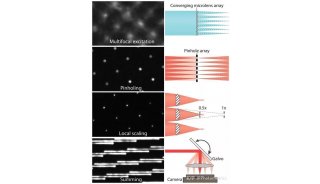
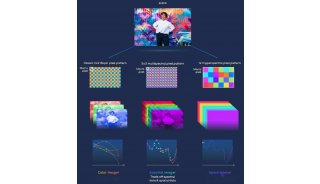
集成成像原理
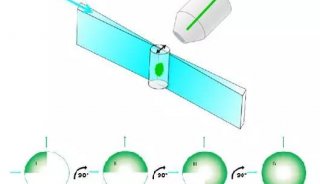
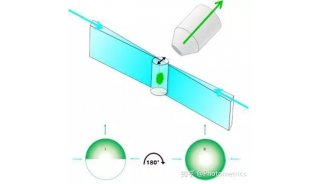
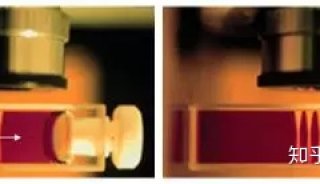
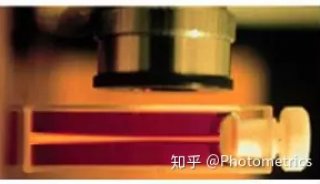
集成成像是一种自动立体(autostereoscopic )和多视角(multiscopic)三维成像技术,通过使用二维微透镜阵列(有时称为蝇眼透镜)捕获并重现光场,通常无需借助较大的集成物镜或观察透镜。再捕获模式下,将胶片或检测器耦合到微透镜阵列,每个微透镜都允许获取从该透镜位置的角度观察到的被摄对象的图像。 在将对象或源阵列耦合到微透镜阵列的再现模式下,每个微透镜允许每个观察眼睛只看到相关的微图像区域,该区域包含从该区域通过该空间可以看到的对象部分。
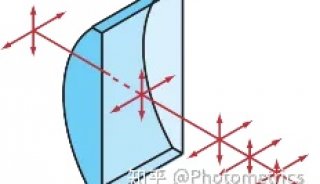
其结果是包含深度信息的视觉重现,包括各个方向上的视差,随观察者的位置和距离而变化的视角。如果镜头足够小且图像质量足够高,则可以提供适应性(Accommodation)线索——要清楚地看到不同深度的物体,眼睛需要进行聚焦调整。与真实体显示中的体素不同,通过微透镜阵列感知到的图像点是虚拟的,并且在空间中只有主观位置,从而可以显示无限深度的场景而无需借助辅助放大透镜。
推荐
-
产品技术

-
产品技术

-
企业风采

-
产品技术

-
企业风采

-
企业风采

-
技术原理
-
招标采购

-
项目成果

-
产品技术

-
产品技术

-
产品技术
-
产品技术
-
项目成果
-
科技前沿

-
焦点事件
-
科技前沿
-
精英视角

-
科技前沿
-
科技前沿
-
焦点事件
-
焦点事件
-
焦点事件

-
产品技术
-
焦点事件

-
焦点事件

-
焦点事件

-
企业风采
-
企业风采

-
项目成果
-
产品技术

-
焦点事件

-
产品技术

-
焦点事件

-
焦点事件

-
企业风采

-
项目成果
-
精英视角
-
项目成果
-
产品技术

-
企业风采

-
焦点事件

-
项目成果

-
综述
-
焦点事件

-
项目成果
-
科技前沿
-
并购

-
产品技术

-
技术原理
-
项目成果